United Rentals
Orion

Building on the timeless approach of navigating by way of the stars, we created a safe and reliable system to guide autonomous vehicles indoors
The Challenge
United Rentals had a variety of autonomous vehicle projects but lacked an indoor navigation solution. GPS, typically used for outdoor autonomous navigation, was unreliable in buildings. Our solution needed to have an interface that was easy to use, be safe enough to include in a human-centric environment, and be capable of performing seamless and accurate point-to-point navigation.
Our Solution
To solve this unique challenge, we used multiple indoor localization systems with an emphasis on sensor fusion. Rather than rely on one sensory data source, we combined multiple sources, creating more certainty and a higher degree of accuracy. Localization, lane detection, and Lidar were some of the many factors that went into developing a comprehensive, autonomous indoor navigation system.
Core Technologies
Key Contributors
































Combining sensory data from different sources
Creating the Orion system required a software navigation stack capable of point-to-point navigation on multiple different vehicle platforms. This is where fusion came into play. Lidar mechanisms determine ranges between the vehicle and objects. Lane detection provides a deeper layer of position determination.
Together, these various tools for the vehicle to understand and make sense of its environment create unprecedented accuracy levels and the reliability United Rentals required.


Mapping and localization
Warehouses are complex and busy. Additionally, the interior environment often changes, with narrow drivelines. Due to the high degree of variability, our team looked for large repeating features and a way to map them out consistently.
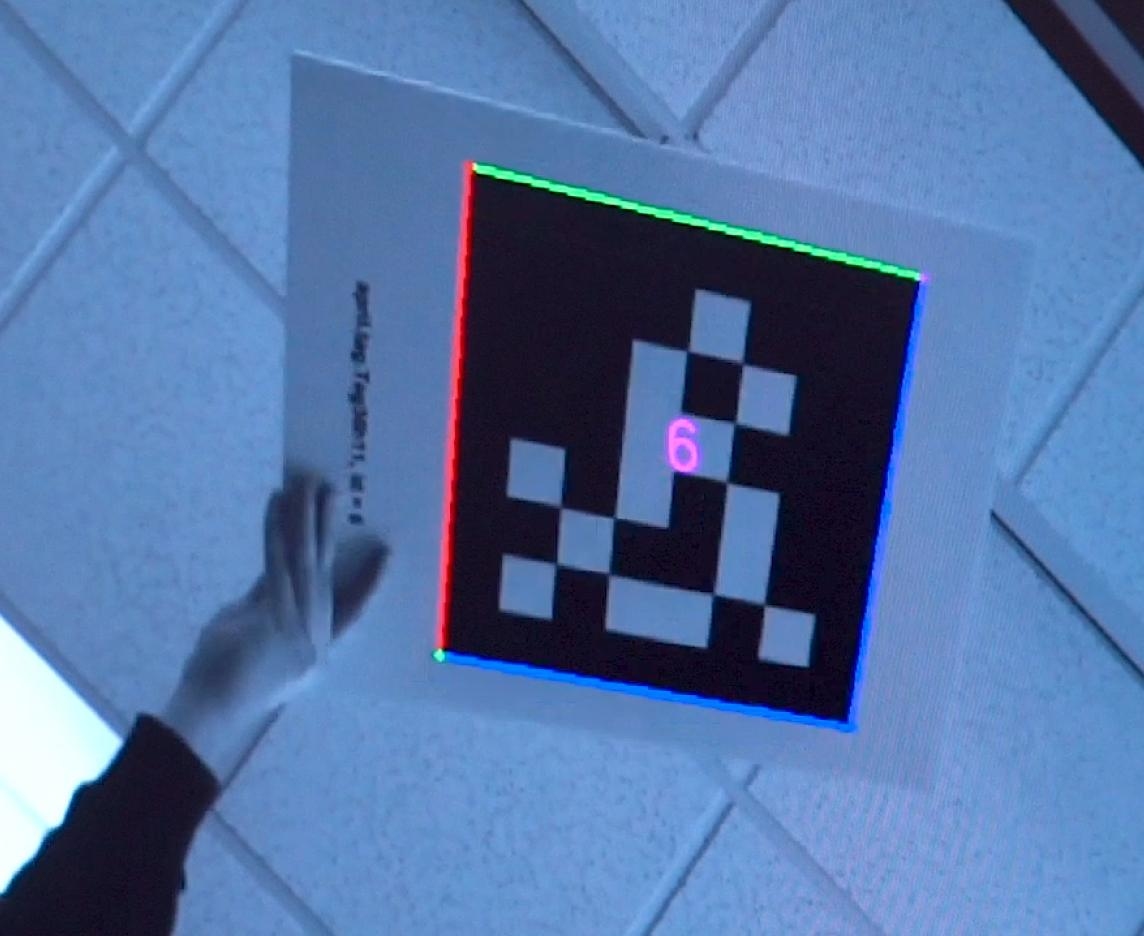
Localization within the Orion system allows the vehicle to determine its position and orientation, and path planning creates a map for the vehicle to follow. The vehicle receives instructions for which path to take from ceiling markers and learns what to expect.

Addressing UX with intuitive operation
The hardware and software under the hood is complex and multi-faceted, but most users will never see it. We also needed to create an intuitive user interface that required minimal training of warehouse personnel.
Fresh designers, developers, and engineers partnered to address the human component, ensuring that while the system was automated, manual control minimized risk and created seamless efficiency.


Designed for safety
In a warehouse environment, our vehicles are not the only moving objects. Collision avoidance was imperative. Because of the presence of manually driven vehicles and people, our technology had to take “moving parts” into consideration.
With a combination of the sensors mentioned previously and integrations explicitly designed for safety, we created a system that allows vehicles to function autonomously within a busy space.


